Publication
* denotes co-first authorship; † denotes corresponding authorship.
Journal
-
Bin Li*, Ziyi Wang*, Bo Lu*, Jiahao Wu, Yiang Lu, Fangxun Zhong, Tak Hong Cheung, Qi Dou, and Yunhui Liu, “AI-Empowered Cooperative *** ** Robotic System for *** **,” Nature Communications, 2025. (Under Review)
-
Dongsheng Li, Yuyang Sun, Junyan Li, Kaiyao Wang, Cheng Hou, Hangwei Zhang, Lining Sun, Bo Lu†, and Huicong Liu, “A Surgical *** ** for Robot-Assisted Surgery,*” Science China-Technological Sciences, 2025. (Under Review)
-
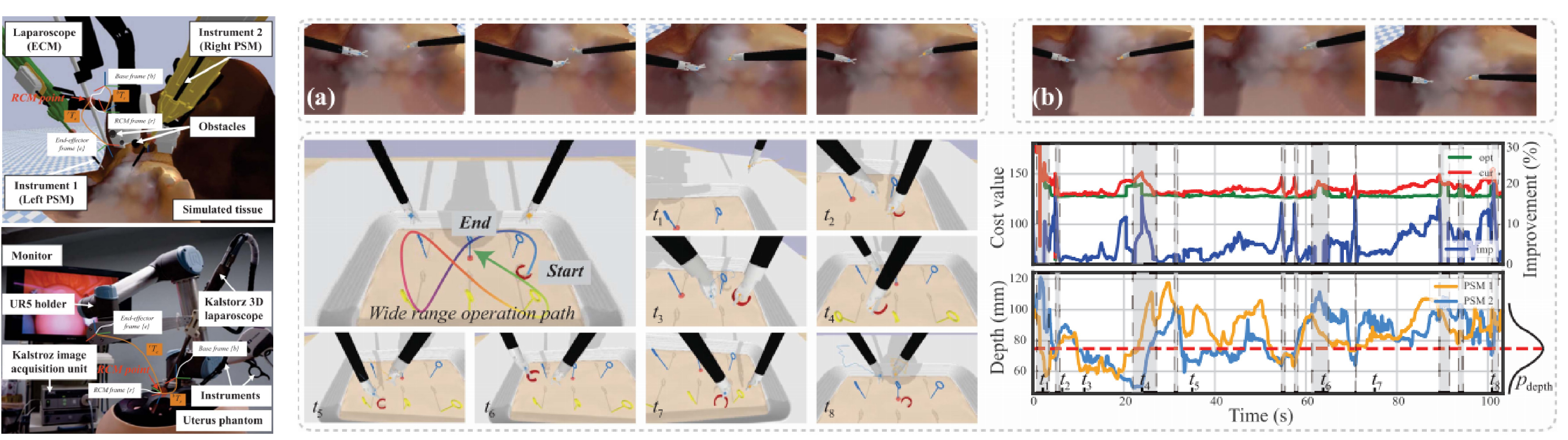
Bo Lu, Zhongkang Yang, Tiancheng Zhou, Ruiqing Tong, Wenzheng Chi, Jiewen Lai, Qi Dou, Yunhui Liu, and Lining Sun, “LEGO: Learning and Executing Generalized Operation Skill Chains for *** **,*” IEEE Transactions on Cybernetics, 2025. (Under Review)
-
Tianliang Yao, Dong Liu, Tao Liu, Bo Lu, Yixuan Yuan, Lakmal Seneviratne, Kaspar Althoefer, Jian Dai, Peng Qi, “Hierarchical Learning Framework for Task-Level Autonomous Intraoperative Image-Guided Robotic *** **,*” IEEE Transactions on Robotics, 2025. (Under Review)
-
Yuan Li, Guanbin Gao, Jing Na, Cheng Hou, Yu Xiang, Yi Bao, Bo Lu†, and, Lining Sun, “Autonomy in *** ** Robots: A Systematic Review,*” IEEE Transactions on Automation Science and Engineering, 2025. (Major Revision)
-
Yizhe Yan, Tiancheng Zhou, Yue Wang, Ziyi Wang, Wenjie Hou, Huicong Liu, Yunhui Liu, Lining Sun, and Bo Lu†, “TRACE-Net: Hierarchical Feature Matching Network with Thermal Response-guidance and Adaptive Coherent-sampling for Endoscopy,” IEEE/ASME Transactions on Mechatronics, 2025. (Major Revision)
-
Yuancheng Shao, Yao Zhang, Jia Gu, Zixi Chen, Di Wu, Yuqiao Chen, Bo Lu†, Wenjie Liu, Cesare Stefanini, Peng Qi, “Deep-Learning-Based Control of a Decoupled Two-Segment Continuum Robot for Endoscopic Submucosal Dissection,” IEEE/ASME Transactions on Mechatronics, 2025. (Major Revision)
-
Tianliang Yao, Bo Lu, Markus Kowarschik, Yixuan Yuan, Hubin Zhao, Sebastien Ourselin, Kaspar Althoefer, Junbo Ge, and Peng Qi, “Advancing Embodied Intelligence in Robotic-Assisted Endovascular Procedures: A Systematic Review of AI Solutions,” IEEE Reviews in Biomedical Engineering, 2025. (Accepted)
-
Yuyang Sun, Dongsheng Li, Ruxiao Yang, Zhicun Zhou, Tianci Ji, Bo Lu, Lining Sun, Huicong Liu, “The Touch-Code Glove: A Multimodal Mapping Interface with Triboelectric-digital Encoding for Intuitive Robot Training,” Soft Science, 2025. (Accepted)
-
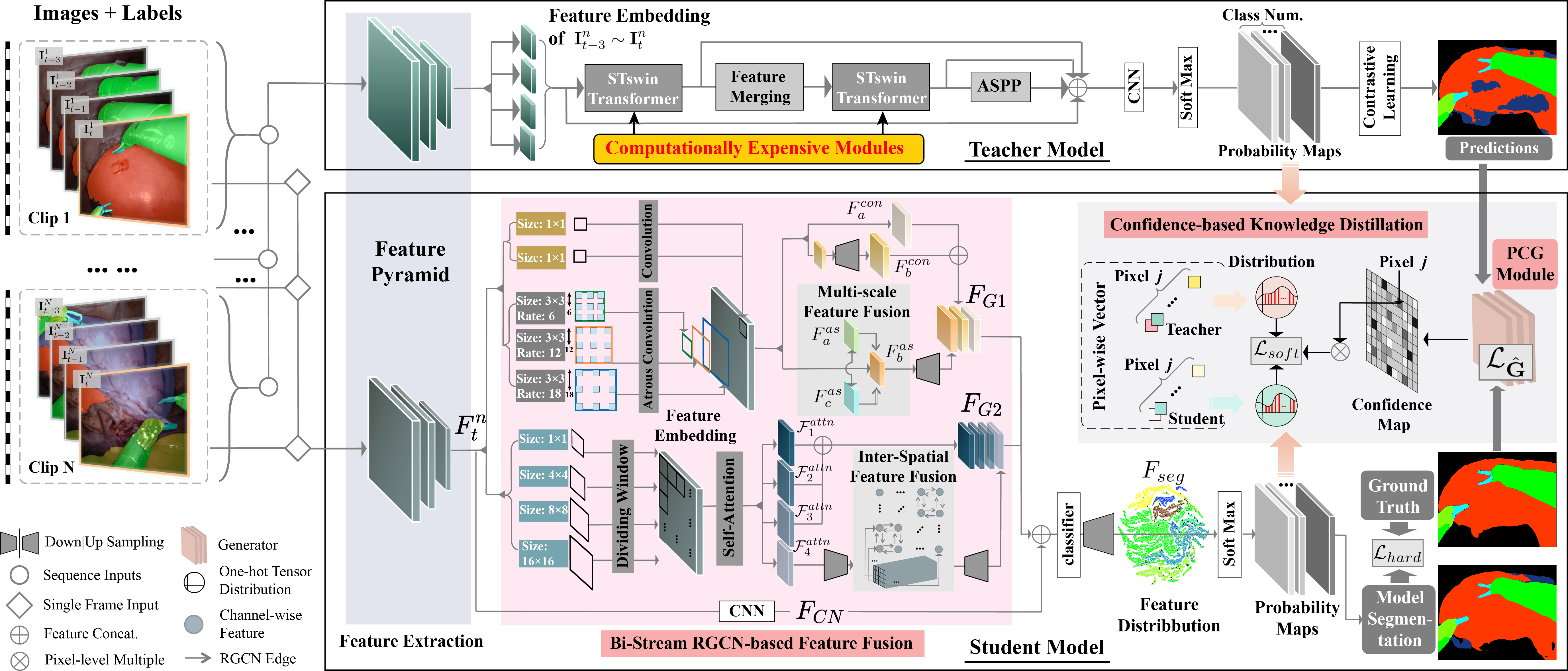
Bo Lu, Xiangxing Zheng, Zhenjie Zhu, Yuhao Guo, Ziyi Wang, Bruce Xinbo Yu, Mingchuan Zhou, Peng Qi, Huicong Liu, Yunhui Liu, and Lining Sun, “PLDKD-Net: Pixel-Level Discriminative Knowledge Distillation for Surgical Scene Segmentation with Bi-stream Visual Parsing and Graph Feature Fusion,” IEEE Transactions on Instrumentation and Measurement, 2025. (Accepted)
-
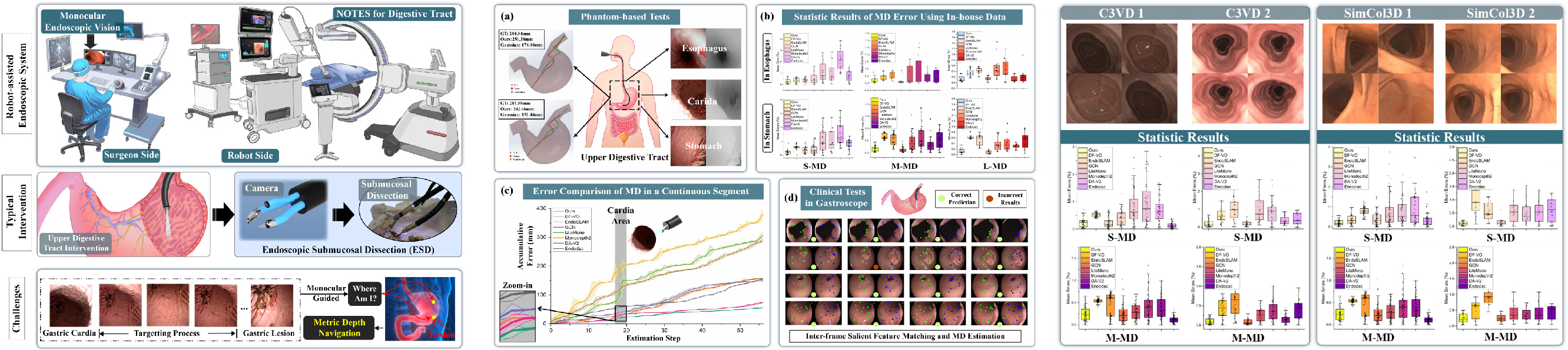
Bo Lu, Tiancheng Zhou, Qingbiao Li, Wenzheng Chi, Yue Wang, Yu Wang, Huicong Liu, Jia Gu, and Lining Sun, “M^3 DEGREEs Net: Monocular-guided Metric Marching Depth Estimation with Graph-based Relevance Ensemble for Endoluminal Surgery,” IEEE Journal of Biomedical and Health Informatics (J-BHI), 2025. (Accepted)
-
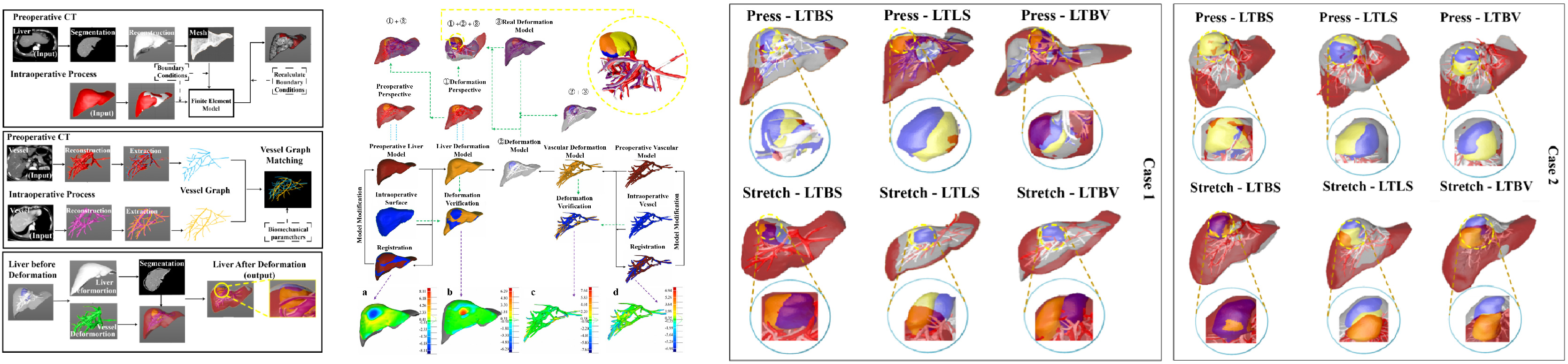
Mingchao Deng, Ding Sun, Tiancheng Zhou, Yixin Gu, Zhongliang Jiang, Fengfeng Zhang, Lining Sun, and Bo Lu†, “Automated Tumor Localization via Synergistic Liver Surface and Vascular Constraints Deformation,” Biomimetic Intelligence and Robotics, 2025. (Accepted)
-
Yuqi Kong, Xiaofei Gong, Yao Wang, Jiajie Yu, Bo Lu†, Wenzheng Chi, and Lining Sun, “Socially Conscious Navigation of Mobile Robots Based on Deep Reinforcement Learning,” IEEE Transactions on Industrial Electronics (T-IE), 2025. @Paper
-
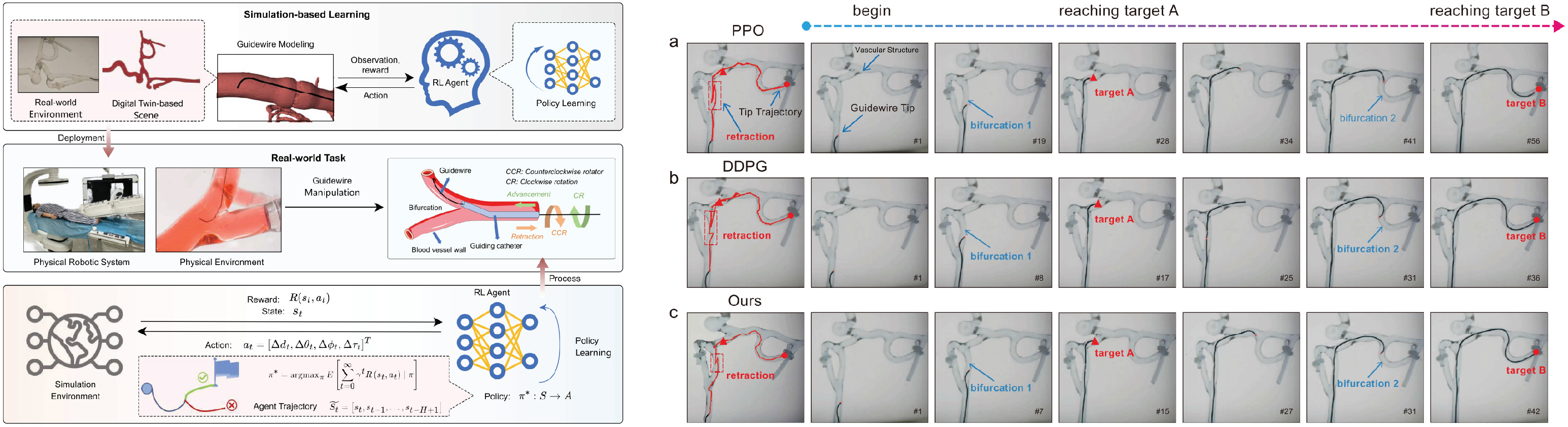
Tianliang Yao, Haoyu Wang, Bo Lu, Jiajia Ge, Zhiqiang Pei, Markus Kowarschik, Lining Sun, Lakmal Seneviratne, and Peng Qi, “Sim2Real Learning with Domain Randomization for Autonomous Guidewire Navigation in Robotic-Assisted Endovascular Procedures,” IEEE Transactions on Automation Science and Engineering (T-ASE), 2025. @Paper
-
Tao Jin, Shuang Gao, Tianhong Wang, Bo Lu, Long Li, Quan Zhang, Yingzhong Tian, and Yangqiao Lin, “Dual-Mode Variable-Stiffness Soft Gripper Based on Electrorheological Fluids,” IEEE Transactions on Industrial Electronics (T-IE), 2025. @Paper

-
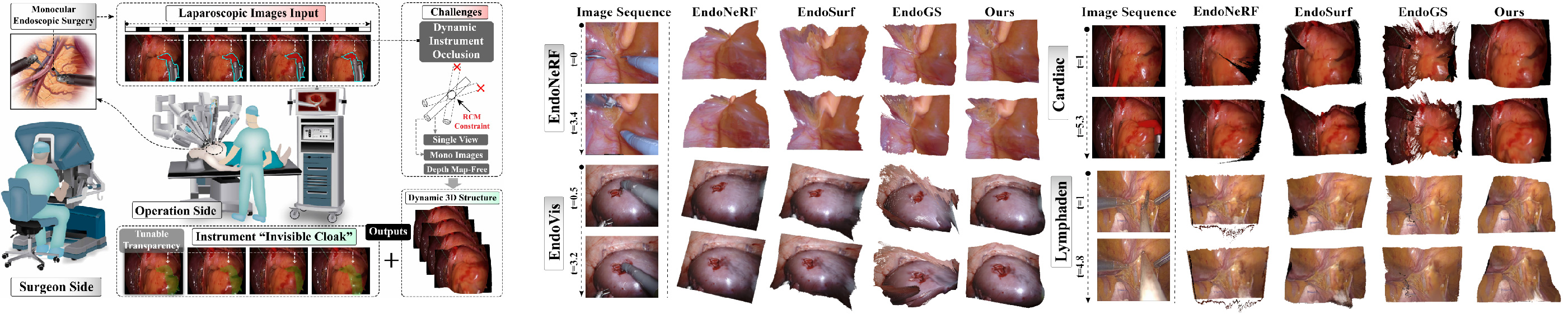
Bo Lu, Chao He, Zhaolei Jiang, Wenjie Hou, Lijun Han, Hesheng Wang, Peng Qi, and Lining Sun, “Endo-4SRF: Learning Radiance Field for Dynamic Surface Reconstruction of Surgical Tissues with Obstacle Stealth Under Single-view and Depth-free Monocular Endoscopy,” IEEE Journal of Biomedical and Health Informatics (J-BHI), 2024. @Paper
-
Cheng Hou, Huxin Gao, Xiaoxiao Yang, Guangming Xue, Xiuli Zuo, Yanqing Li, Dongsheng Li, Bo Lu†, Hongliang Ren, Huicong Liu, Lining Sun, “Piezoresistive-Based 3-Axial MEMS Tactile Sensor for Gastrointestinal Endoscopic Minimally Invasive Surgery Instruments,” Microsystems & Nanoengineering, 2024. @Paper

-
Chao Liu, Tianyu Shen, Huan Shen, Mingxiang Ling, Guodong Chen, Bo Lu, Feng Chen, Zhenhua Wan, “Investigating the Mechanical Performance of BionicWings Based on the Flapping Kinematics of Beetle Hindwings,” Biomimetics, 2024. @Paper

-
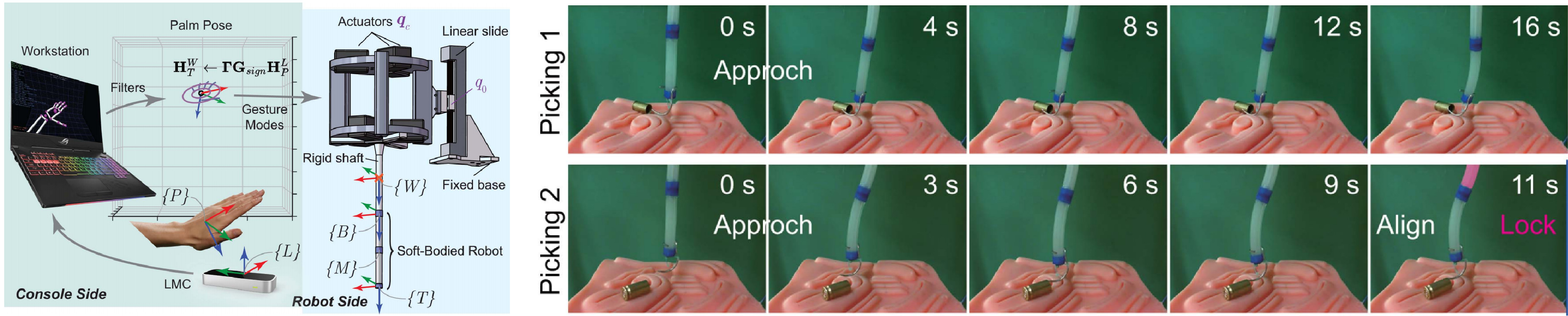
Jiewen Lai, Bo Lu†, Kaicheng Huang, Henry K. Chu, “Gesture-Based Steering Framework for Redundant Soft Robots,” IEEE-ASME Transactions on Mechatronics (T-MECH), 2024. @Paper
-
Bin Li*, Bo Lu*, Hongbin Lin, Yaxiang Wang, Fangxun Zhong, Qi Dou, Yunhui Liu, “On the Monocular 3D Pose Estimation for Arbitrary Shaped Needle in Dynamic Scenes: An Efficient Visual Learning and Geometry Modeling Approach,” IEEE Transactions on Medical Robotics and Bionics (T-MRB), 2024. @Paper

-
Bin Li, Yiang Lu, Wei Chen, Bo Lu, Fangxun Zhong, Qi Dou, Yunhui Liu, “GMM-based Heuristic Decision Framework for Safe Automated Laparoscope Control,” IEEE Robotics and Automation Letter (RA-L), 2024. @Paper
-
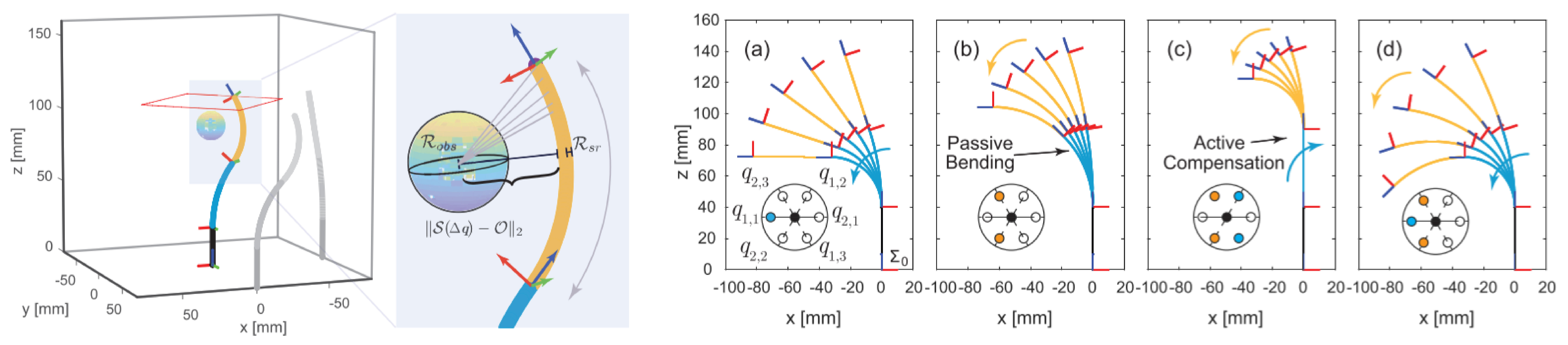
Yiang Lu, Wei Chen, Bo Lu, Jianshu Zhou, Zhi Chen, Qi Dou, and Yunhui Liu, “Adaptive Online Learning and Robust 3-D Shape Servoing of Continuum and Soft Robots in Unstructured Environments,” Soft Robotics, 2024. @Paper
-
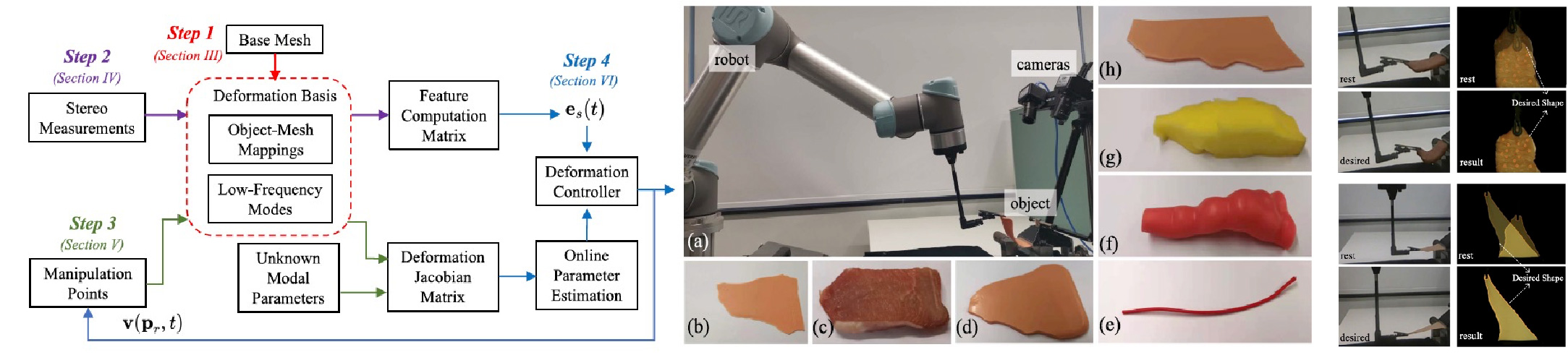
Bohan Yang, Bo Lu, Wei Chen, Fangxun Zhong, Yunhui Liu, “Model-Free 3D Shape Control of Deformable Objects Using Novel Features Based on Modal Analysis,” IEEE Transactions on Robotics (T-RO), 2023. @Paper
-
Meiyuan Zou, Jiajie Yu, Yong Lv, Bo Lu†, Wenzheng Chi, and Lining Sun, “A Novel Day-to-Night Obstacle Detection Method for Excavators based on Image Enhancement and Multi-sensor Fusion,” IEEE Sensor Journal, 2023. @Paper
-
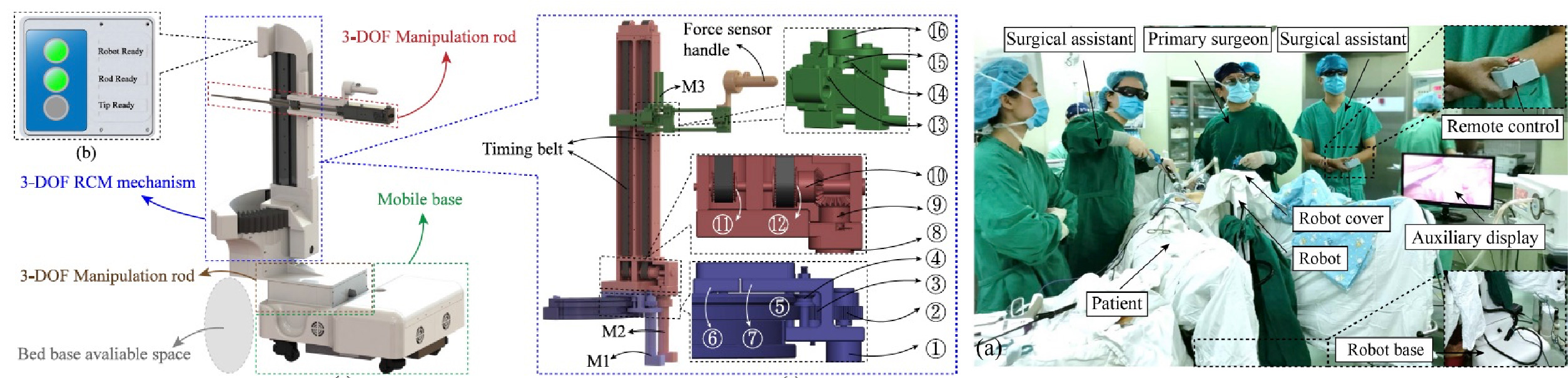
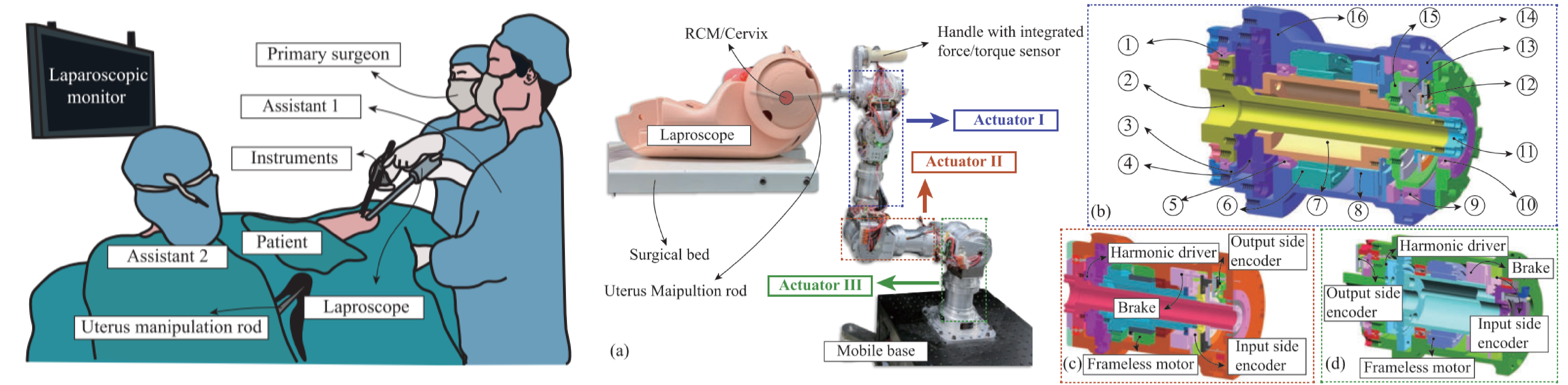
Jiahao Wu, Taowang Wang, Huanhuan Guo, Yaqing Wang, Dezhao Guo, Bo Lu, Ziyi Wang, Fangxun Zhong, Hesheng Wang, Jiangjing Yuan, Yuhong Li, Tak-Hong Cheung, Yudong Wang, and Yunhui Liu, “Design, Control, and Experiments of A Novel Robotic Uterine Manipulator with the Motorized 3-DoF Manipulation Rod,” IEEE Transactions on Biomedical Engineering (T-BME), 2023. @Paper
-
Yiang Lu, Wei Chen, Bin Li, Bo Lu, Jianshu Zhou, Yunhui Liu, “A Robust Graph-Based Framework for 3-D Shape Reconstruction of Flexible Medical Instruments Using Multi-Core FBGs,” IEEE Transactions on Medical Robotics and Bionics (T-MRB), 2022. @Paper
-
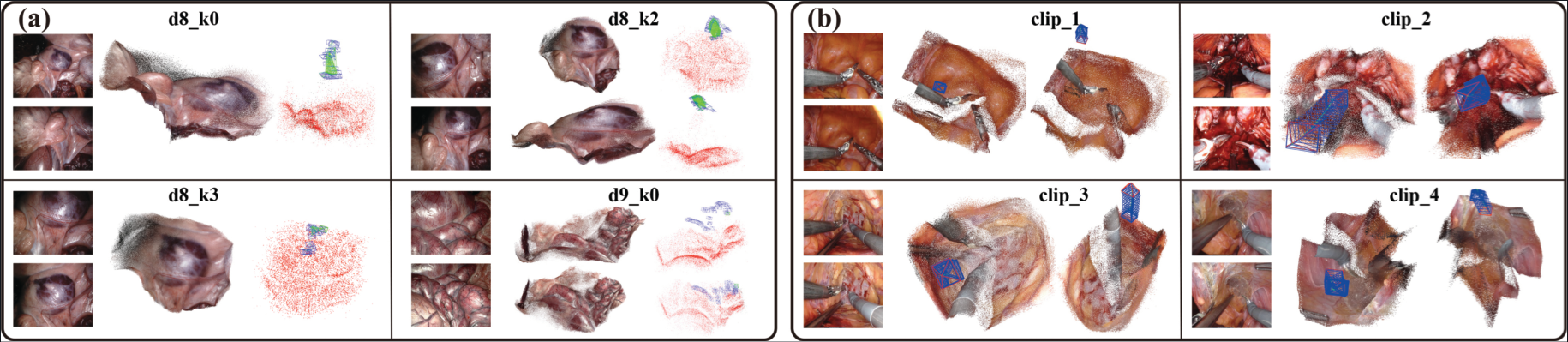
Ruofeng Wei, Bin Li, Hangjie Mo, Bo Lu, Yonghao Long, Bohan Yang, Qi Dou, Yunhui Liu, and Dong Sun, “Stereo Dense Scene Reconstruction and Accurate Laparoscope Localization for Learning-Based Navigation in Robot-Assisted Surgery,” IEEE Transactions on Biomedical Engineering (T-BME), 2022. @Paper
-
Jiahao Wu, Wei Chen, Dezhao Guo, Gan Ma, Zerui Wang, Yucheng He, Fangxun Zhong, Bo Lu, Yudong Wang, Tak-Hong Cheung, and Yunhui Liu, “Robot-enabled Uterus Manipulator for Laparoscopic Hysterectomy with Soft RCM Constraints: Design, Control and Evaluation,” IEEE Transactions on Medical Robotics and Bionics (T-MRB), 2022. @Paper
-
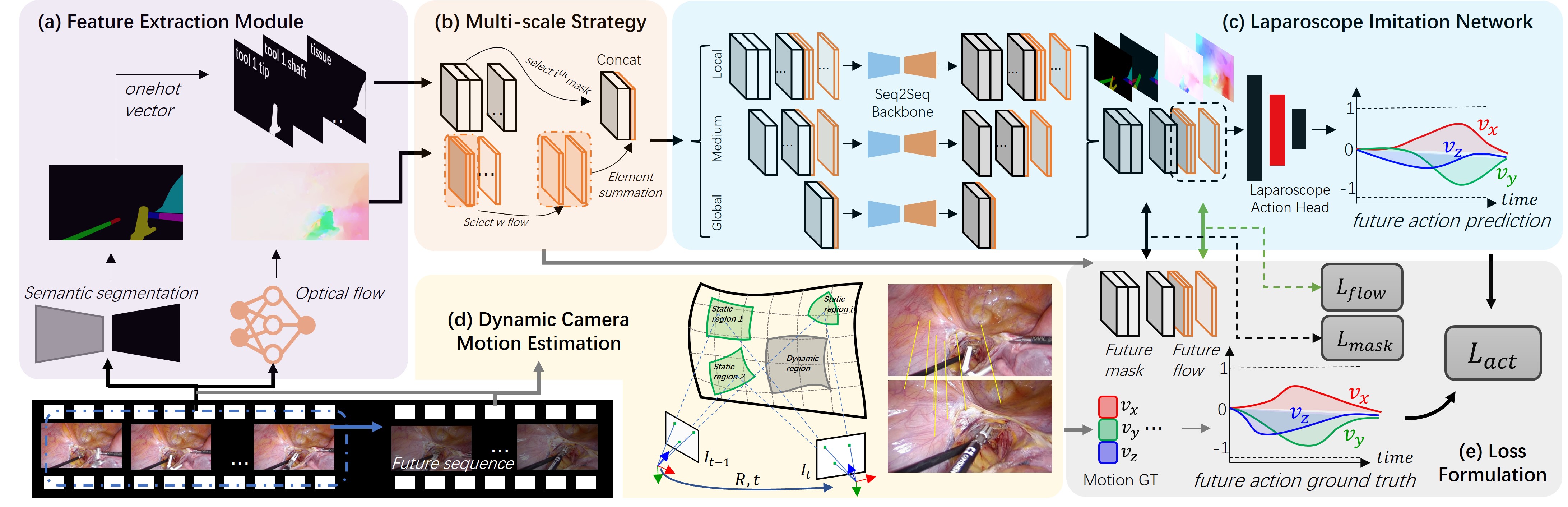
Bin Li, Bo Lu†, Ziyi Wang, Fangxun Zhong, Qi Dou, and Yunhui Liu, “Learning Laparoscope Actions via Video Features for Proactive Robotic Field-of-view Control,” IEEE Robotics and Automation Letter (RA-L), 2022. @Paper
-
Bo Lu, Bin Li, Qi Dou, Yunhui Liu, “A Unified Monocular Camera-based and Pattern-Free Hand-to-Eye Calibration Algorithm for Surgical Robots with RCM Constraints,” IEEE/ASME Transactions on Mechatronics (T-MECH), 2022. @Paper

-
Jiewen Lai, Bo Lu, Qingxiang Zhao, Henry K. Chu, “Constrained Motion Planning of A Cable-Driven Soft Robot With Compressible Curvature Modeling,” IEEE Robotics and Automation Letter (RA-L), 2022. @Paper
-
Jiankai Sun, De-An Huang, Bo Lu, Yunhui Liu, Bolei Zhou, Animesh Garg, “PlaTe: Visually-Grounded Planning with Transformers in Procedural Tasks,” IEEE Robotics and Automation Letter (RA-L), 2021.

-
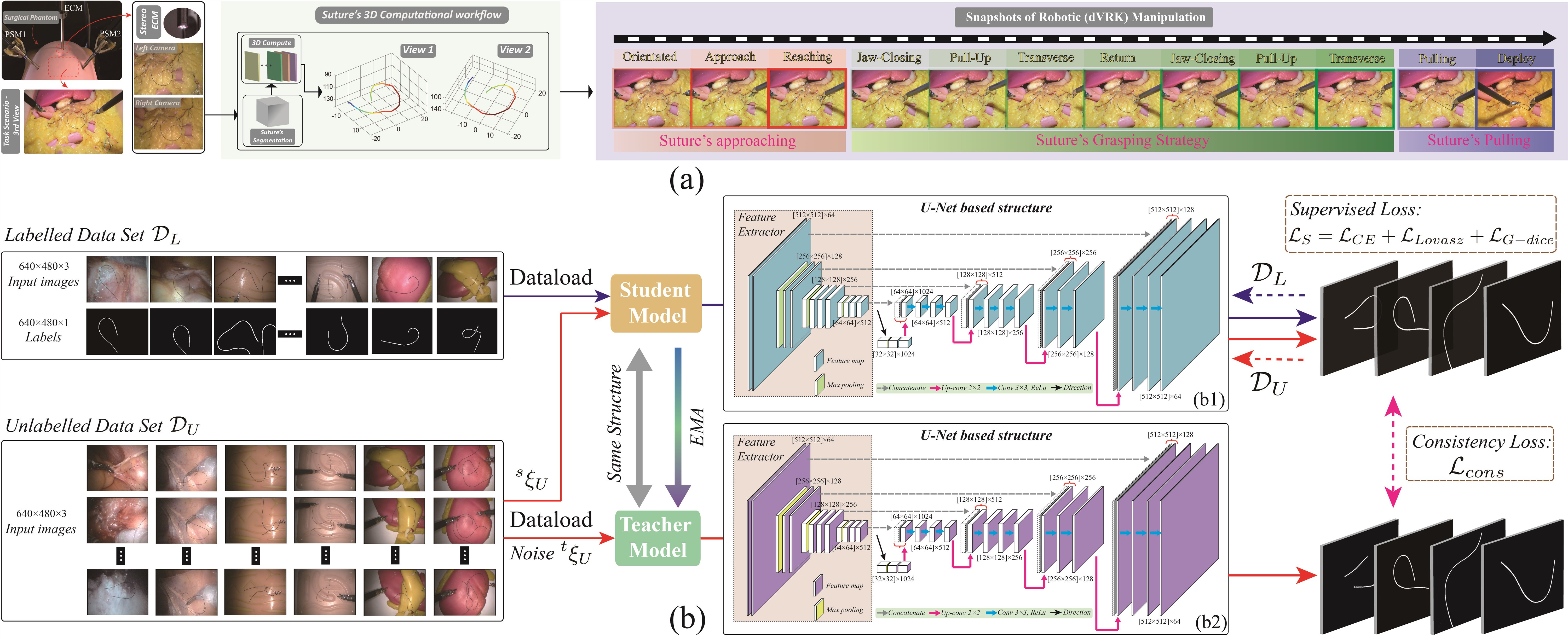
Bo Lu, Bin Li, Wei Chen, Yue-ming Jin, Zixu Zhao, Qi Dou, Pheng-Ann Heng, Yun-Hui Liu, “Towards Image-Guided Automated Suture Grasping Under Complex Environments: A Learning-Enabled and Optimization-Based Holistic Framework,” IEEE Transactions on Automation Science and Engineering (T-ASE), 2021. @Paper
-
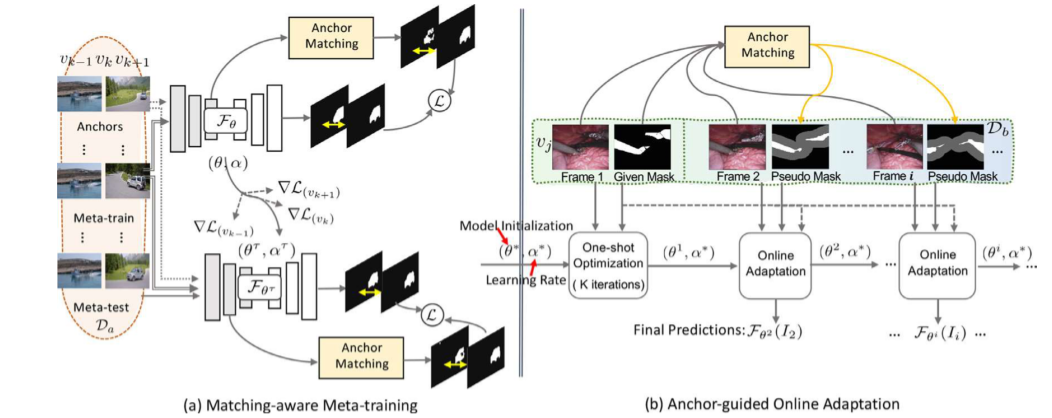
Zixu Zhao, Yueming Jin, Junming Chen, Bo Lu, Chi-Fai Ng, Yun-Hui Liu, Qi Dou, Pheng-Ann Heng, “Anchor-guided Online Meta Adaptation for Fast One-Shot Instrument Segmentation from Robotic Surgical Videos,” Medical Image Analysis (MIA), 2021. @Paper
-
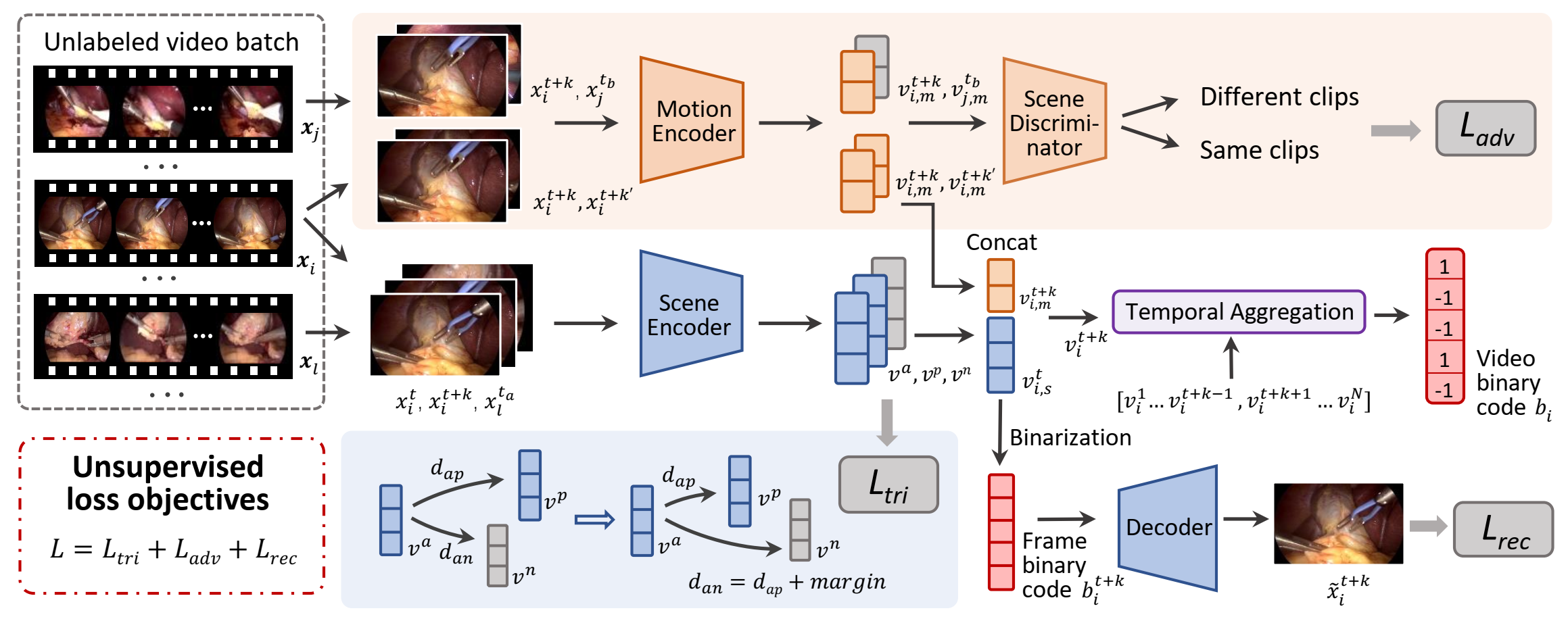
Ziyi Wang, Bo Lu, Xiaojie Gao, Yueming Jin, Zerui Wang, Tak Hong Cheung, Qi Dou, Pheng Ann Heng, Yunhui Liu, “Unsupervised Feature Disentanglement for Video Retrieval in Minimally Invasive Surgery,” Medical Image Analysis (MIA), 2021. @Paper
-
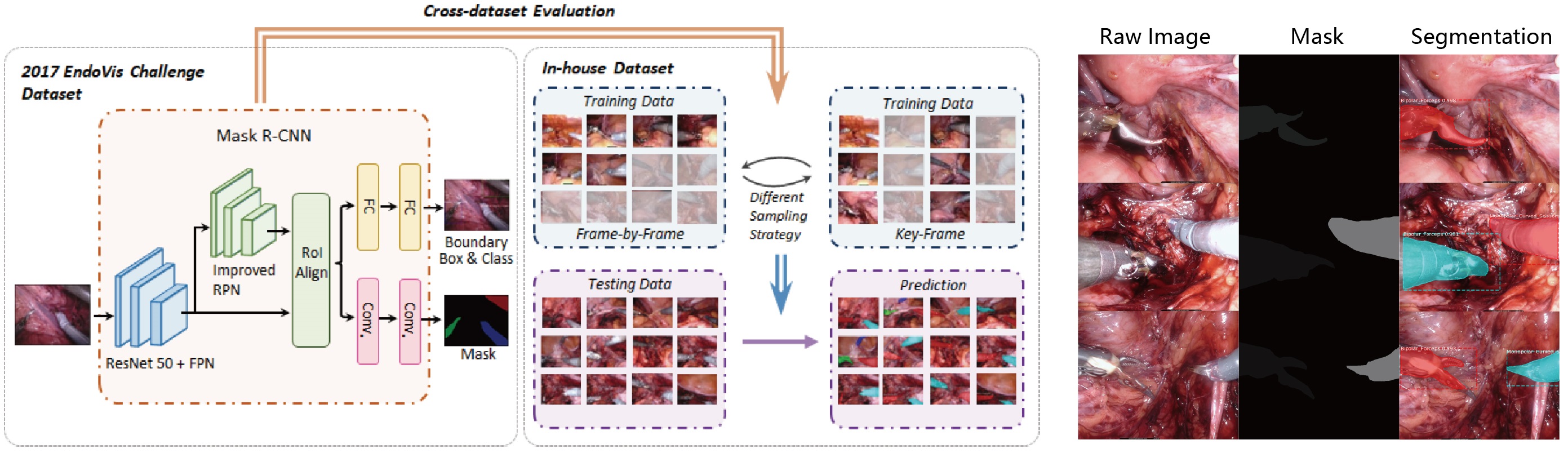
Xiaowen Kong, Yueming Jin, Qi Dou, Ziyi Wang, Zerui Wang, Bo Lu, Erbao Dong, Yun-Hui Liu, Dong Sun, “Accurate Instance Segmentation of Surgical Instruments in Robotic Surgery: Model Redesign and Cross-dataset Evaluation,” International Journal of Computer Assisted Radiology and Surgery (IJCARS), 2021. @Paper
-
Jiewen Lai, Kaicheng Huang, Bo Lu, Qingxiang Zhao, and Henry K. Chu, “Verticalized-Tip Trajectory Tracking of A 3D-Printable Soft Continuum Robot: Enabling Surgical Blood Suction Automation,” IEEE/ASME Transactions on Mechatronics (T-MECH), 2021. @Paper

-
Jiewen Lai, Bo Lu, Henry K. Chu, “Variable-Stiffness Control of A Dual-Segment Soft Robot using Depth Vision,” IEEE/ASME Transactions on Mechatronics (T-MECH), 2021. @Paper
-
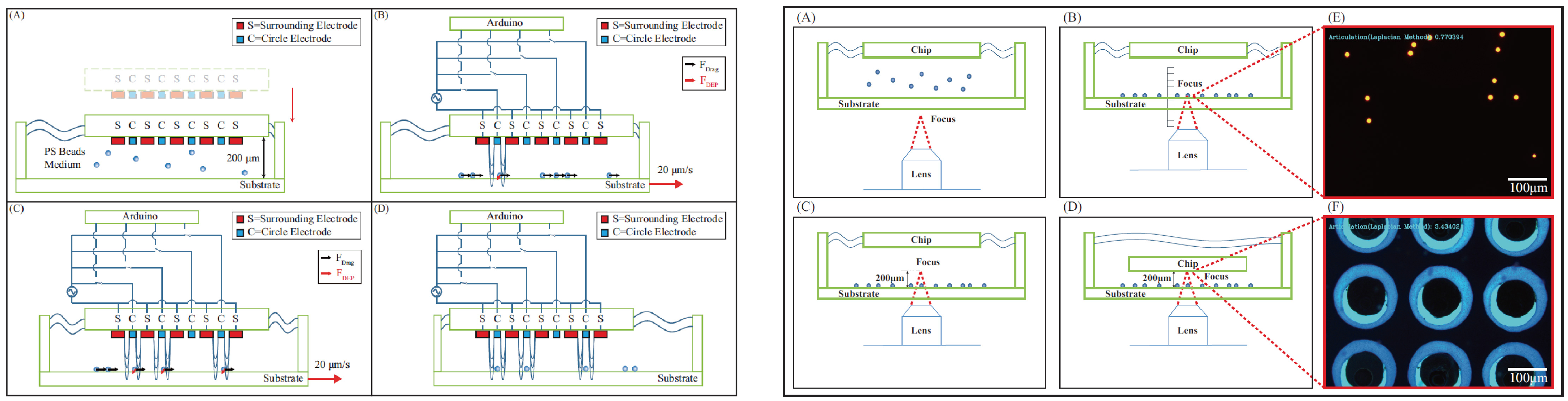
Kaicheng Huang, Zhenxi Cui, Jiewen Lai, Bo Lu and Henry K. Chu, “Optimization of A Single-particle Micropatterning System with Robotic nDEP-Tweezers,” IEEE Transactions on Automation Science and Engineering (T-ASE), 2021. @Paper
-
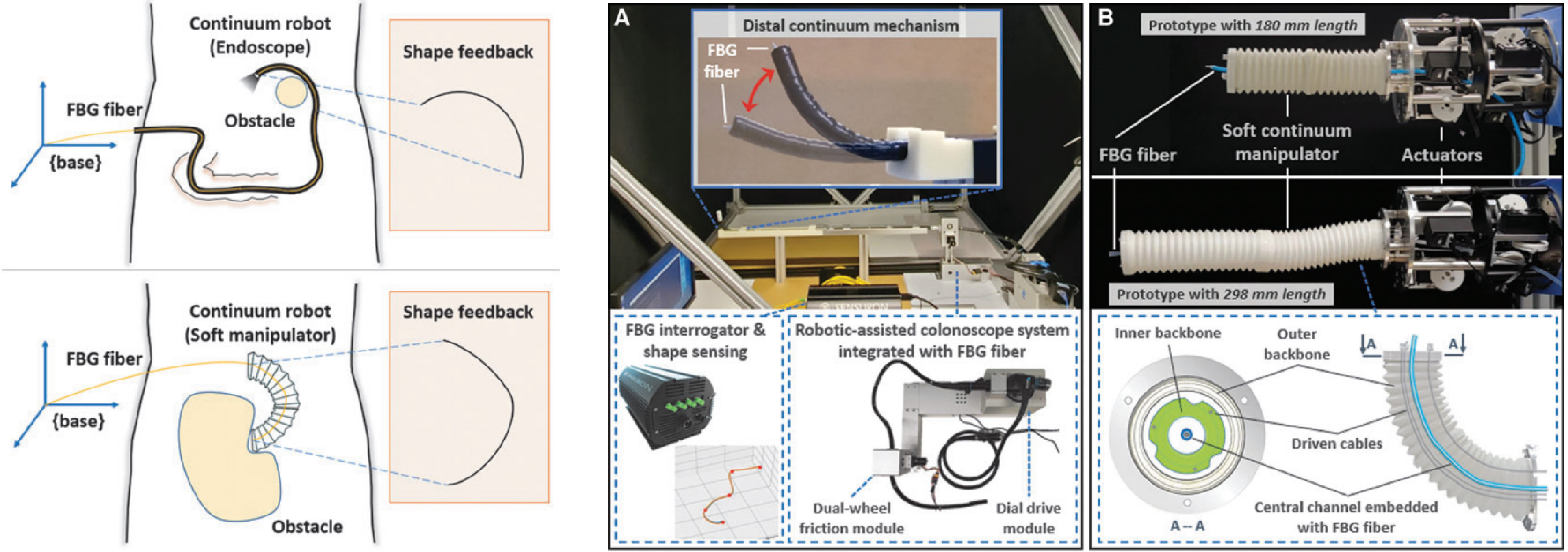
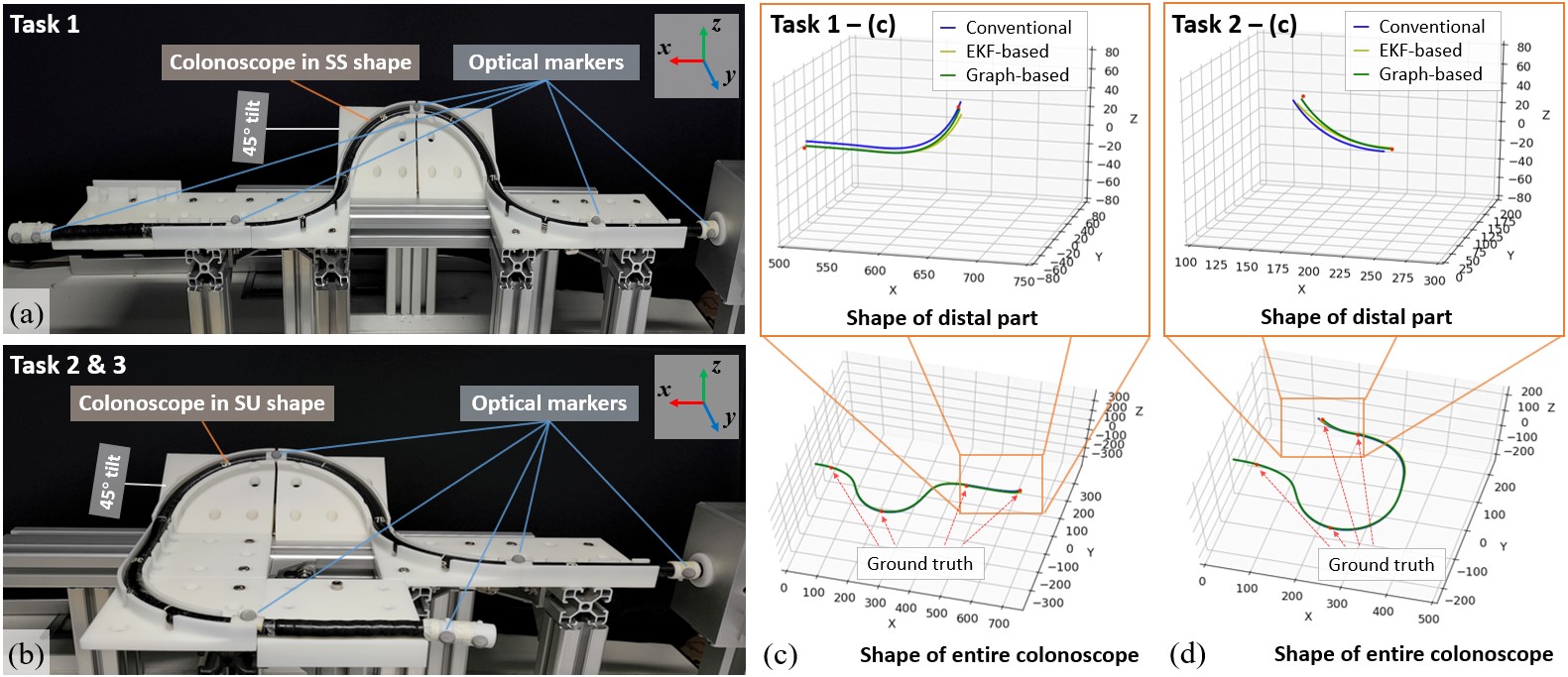
Yiang Lu, Bo Lu†, Bin Li, Huanhuan Guo, and Yun-hui Liu, “Robust Three-Dimensional Shape Sensing for Flexible Endoscopic Surgery Using Multi-Core FBG Sensors,” IEEE Robotics and Automation Letter (RA-L with 2021 ICRA), vol. 6, no. 3, pp. 4835-4842, 2021. @Paper

-
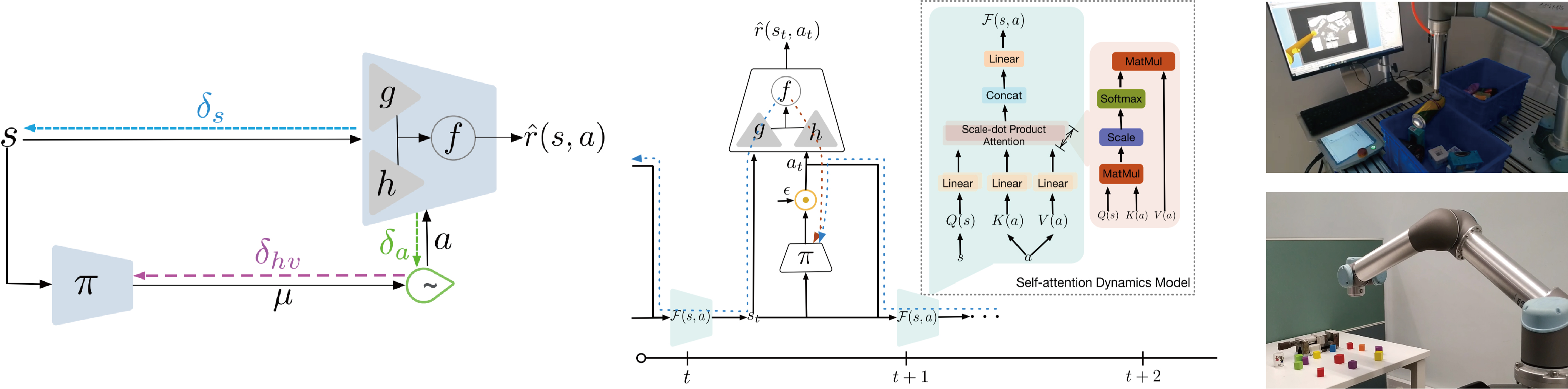
Jiankai Sun, Lantao Yu, Pinqian Dong, Bo Lu, Bolei Zhou, “Adversarial Inverse Reinforcement Learning with Self-attention Dynamics Model,” IEEE Robotics and Automation Letter (RA-L with 2021 ICRA), vol. 6, no. 2, pp. 1880-1886, 2021. @Paper
-
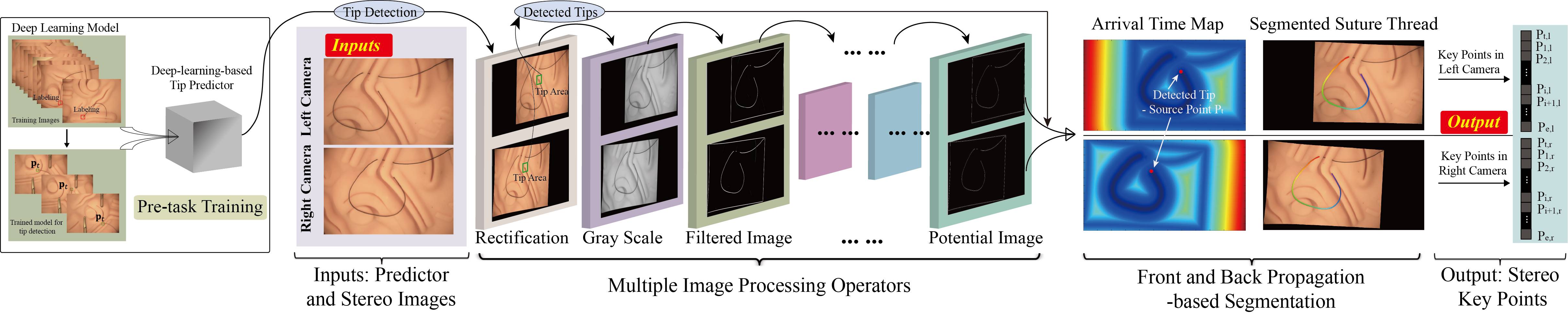
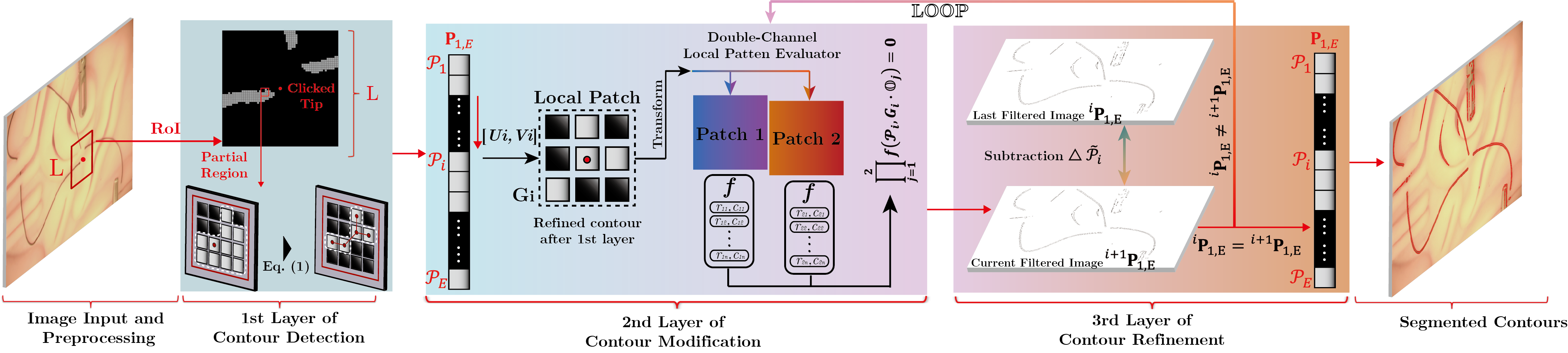
Bo Lu, Xinbo Yu, Jiewen Lai, Kaicheng Huang, Keith C. C. Chan, and Henry K. Chu, “A Learning Approach for Suture Thread Detection With Feature Enhancement and Segmentation for 3-D Shape Reconstruction,” IEEE Transactions on Automation Science and Engineering (T-ASE), vol. 17, no. 2, pp. 858-870, 2020. @Paper
-
Bo Lu, Henry K. CHU, Kaicheng Huang, Jiewen Lai and Li Cheng, “Surgical Suture Thread Detection and 3-D Reconstruction Using a Model-free Approach in a Calibrated Stereo-visual System,” IEEE/ASME Transactions on Mechatronics (T-MECH), vol. 25(2), 2020. @Paper
-
Kaicheng Huang, Bo Lu, Henry K. Chu, Jiewen Lai, “Microchip System for Patterning Cells on Different Substrates via Negative Dielectrophoresis,” IEEE Transactions on Biomedical Circuits and Systems (T-BioCAS), vol. 13. no. 5, pp. 1063-1074, 2019. @Paper
-
Bo Lu, Henry K. Chu, Kaicheng Huang and Li Cheng, “Vision-based Surgical Suture Looping through Trajectory Planning for Wound Suturing,” IEEE Transactions on Automation Science and Engineering (T-ASE), vol. 16, no. 2, pp. 542-556, 2018. @Paper
-
Hao Xu, Bo Lu, Zhongqing Su, Li Cheng, “Statistical enhancement of a dynamic equilibrium-based damage identification strategy: Theory and experimental,” Journal of Sound and Vibration (J-SV), 2015. @Paper
Conference
-
Bo Lu, Lei Li, Tianliang Yao, Yixin Gu, Markus Kowarschik, Jiajia Ge, Yixuan Yuan, Lining Sun, Peng Qi, “VAS-Diffuser: Visual-Augmented and Structure-Informed Diffuser for Guidewire Trajectory Prediction in Robotic Endovascular Interventions,” The IEEE International Conference on Robotics and Automation (ICRA), 2026.
-
Hao Wang, Tianliang Yao, Bo Lu, Zhiqiang Pei, dong liu, Lei Ma, Peng Qi, “Sample-Efficient Learning with Online Expert Correction for Autonomous Catheter Steering in Endovascular Bifurcation Navigation,” The IEEE International Conference on Robotics and Automation (ICRA), 2026.
-
Tianliang Yao, li Bingrui, Bo Lu, Zhiqiang Pei, Yixuan Yuan, Peng Qi, “Real-Time 3D Guidewire Reconstruction from Intraoperative DSA Images for Robot-Assisted Endovascular Interventions,” The IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025. (Accepted)
-
Jiangang Zhang, Yizhe Yan, Wenzheng Chi, Lining Sun, and Bo Lu†, “Surgical Suture Thread Predict Framework For Multi-Scenario Pose-Aware Based on Diffusion Probabilistic Model,” The IEEE International Conference on Real-time Computing and Robotics (RCAR), 2025. @Paper
-
Ruxiao Yang, Yuyang Sun, Dongsheng Li, Bo Lu, Fengxia Wang, Haiyan Hu, Shumei Yu, Huicong Liu, “A Self-Powered Bimodal Tactile Sensing Cap for Colonoscopic Examination,” The IEEE International Conference on Real-time Computing and Robotics (RCAR), 2025. @Paper
-
Tianliang Yao, Jingwei Song, Madaoji Ban, Bo Lu, Zhiqiang Pei, Peng Qi, “Sim4EndoR: A Reinforcement Learning Centered Simulation Platform for Task Automation of Endovascular Robotics,” The IEEE International Conference on Robotics and Automation (ICRA), 2025. @Paper
-
Zhenxi Cui, Jiewen Lai, Bo Lu, Yi Guo, and Henry K. Chu, “Human-Led Robotic Transportation of Elastic Objects with Adaptive Control,” International Conference on Robotics and Automation Engineering (ICRAE), 2024. @Paper
-
Yinxi Chen, Zhan Yang, Bo Lu, and Xinjian Fan, “Miniature Soft Robots Capable of Multiform and Multimodal Locamotion,” The IEEE International Conference on Real-time Computing and Robotics (RCAR), 2024. @Paper
-
Jiaxin Hu, Bo Lu†,, Jinlin Liu, Tiancheng Zhou, Xinjian Fan, Xiaoang Liu, Dianbiao Dong, Long Chen, “A 4-channel Acoustic Sensor System for Sound Source Detection of the Service Robot,” The IEEE International Conference on Real-time Computing and Robotics (RCAR), 2024. @Paper
-
Chenyang Cao, Xujun Xu, Xiaofei Gong, Bo Lu, Wenzheng Chi, Lining Sun, “ANMIP: Adaptive Navigation based on Mutual Information Perception in Uncertain Environments,” IEEE International Conference on Robotics and Biomimetics (ROBIO), 2023. @Paper
-
Peng Qi,Yunfeng Wu,Tianliang Yao, Bo Lu, Yi Sun, Jianshen Dai, “A Haptic Exploration and Surface Classification of Objects with Four Typical Surface Properties,” IEEE Conference on Advanced Robotics and Mechatronics (ICARM), 2023. (Best Conference Paper Finalist) @Paper
-
Yunfeng Wu, Junze Li, Bo Lu, Changzhu Zhang, Peng Qi, “Feature Extraction of Motor Imagination EEG Signals for a Collaborative Exoskeleton Robot Based on PSD Analysis,” 42nd Chinese Control Conference, 2023. @Paper
-
Yuhao Guo, Tiancheng Zhou, Wenzheng Chi, Feng Zhou, Peng Qi, Lining Sun, and Bo Lu†, “SIT-Net: Surgical Image Translation Network Using a Generative Adversarial Method with Visual Feature Disentanglement,” The IEEE International Conference on Real-time Computing and Robotics (RCAR), 2023. (Best Student Paper Finalist) @Paper
-
Kang Song, Yueyuan Zhang, Bo Lu, Wenzheng Chi, Lining Sun, “UAV Forest Fire Detection based on RepVGG-YOLOv5,” The 2022 IEEE International Conference on Robotics and Biomimetics (Robio), 2022. @Paper
-
Ziyi Wang, Bo Lu, Yonghao Long, Fangxun Zhong, Tak Hong Cheung, Qi Dou, Yunhui Liu, “AutoLap: A New Dataset with Integrated Multi-Tasks towards Image-Guided Surgical Automation in Laparoscopic Hysterectomy,” Medical Image Computing and Computer Assisted Interventions (MICCAI), 2022. @Paper
-
Meiyuan Zou, Jiajie Yu, Bo Lu, Wenzheng Chi, Lining Sun, “Active Pedestrian Detection for Excavator Robots based on Multi-Sensor Fusion”, The IEEE International Conference on Real-time Computing and Robotics (RCAR), 2022. @Paper
-
Bin Li, Ruofeng Wei, Jiaqi Xu, Bo Lu†, Chi Hang Yee, Chi-Fai Ng, Pheng-Ann Heng, Qi Dou, Yunhui Liu, “3D Perception based Imitation Learning under Limited Demonstration for Laparoscope Control in Robotic Surgery,” The IEEE International Conference on Robotics and Automation (ICRA), 2022. @Paper
-
Jiaqi Xu, Bin Li, Bo Lu, Yun-Hui Liu, Qi Dou, Pheng Ann Heng, “SurRoL: An Open-source RL Centered and dVRK Compatibale Platform for Surgical Robot Learning,” The IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021. @Paper
-
Bin Li, Bo Lu†, Yiang Lu, Qi Dou, and Yun-Hui Liu, “Data-driven Holistic Framework for Automated Laparoscope Optimal View Control with Learning-based Depth Perception,” The IEEE International Conference on Robotics and Automation (ICRA), 2021. @Paper
-
Yonghao Long, Jie Ying Wu, Bo Lu, Yueming Jin, Mathias Unberath, Yun-Hui Liu, Pheng-Ann Heng and Qi Dou, “Relating Multi-modal Embeddings for Accurate Gesture Recognition in Robotic Surgery via Graph Neural Networks,” The IEEE International Conference on Robotics and Automation (ICRA), 2021. (Accepted, Best Paper Award of ICRA 2021 in Medical Robotics) @Paper
-
Zixu Zhao, Yueming Jin, Bo Lu, Chi-Fai Ng, Qi Dou, Yunhui Liu, and Pheng-Ann Heng, “One to Many: Adaptive Instrument Segmentation via Meta Learning and Dynamic Online Adaptation in Robotic Surgical Videos,” The IEEE International Conference on Robotics and Automation (ICRA), 2021. @Paper
-
Bo Lu†, Wei Chen, Yue-ming Jin, Dandan Zhang, Qi Dou, Henry K. Chu, Pheng-Ann Heng, Yun-Hui Liu, “A Learning-Driven Framework with Spatial Optimization For Surgical Suture Thread Reconstruction and Autonomous Grasping Under Multiple Topologies and Environmental Noises,” The IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020. @Paper
-
Zhenxi Cui, Kaicheng Huang, Bo Lu and Henry K. Chu, “Automated Folding of a Deformable Thin Object through Robot Manipulators,” The IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020. @Paper
-
Jiewen Lai, Kaicheng Huang, Bo Lu and Henry K. Chu, “Toward Vision-based Adaptive Configuring of A Bidirectional Two-Segment Soft Continuum Manipulator,” IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), 2020. @Paper
-
Zhenxi Cui, Kaicheng Huang, Bo Lu, Henry K. Chu, “Three-Dimensional Localization of Needle Tip Immersed in Medium,” IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), 2019. @Paper
-
Kaicheng Huang, Henry K. Chu, Bo Lu, Jiewen Lai, Li Cheng, “Automated Cell Patterning System with a Microchip using Dielectrophoresis,” The IEEE Conference on Robotics and Automation (ICRA), 2019. @Paper
-
Kaicheng Huang, Henry K. Chu, Bo Lu, Li Cheng, “Characterization of a Microchip Device for Cell Patterning via Negative Dielectrophoresis,” The IEEE Conference on Robotics and Biomimetics (Robio), 2018. @Paper
-
Bo Lu, Henry K. Chu, and Li Cheng, “Robotic Knot Tying Through a Spatial Trajectory With a Visual Servoing System,” The IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2017. @Paper
-
Bo Lu, Henry K. CHU, Li Cheng, “Dynamic Trajectory Planning for Robotic Knot Tying,” The IEEE International Conference on Real-time Computing and Robotics (RCAR), 2016. @Paper
Pattern
- Bo Lu, Huicong Liu, Wenzheng Chi, Tao Chen, Lining Sun, “A novel hand-eye calibration methods for surgical robots with Remote Center of Motion (RCM) constraints”, 2022105325057, 2022.